Goldberg
A Better Tiny Whoop Frame
I've never done much Tiny Whooping, 'cause indoor flying gives me such a headache I'm put out of commission for half a day (I think it's the low speed and constant corrections that gets to me). So when Randy Slavin asked me to take a shot at designing a stronger frame out of nylon, one with more durable motor struts, I had to take a crash course in all things Whoop. I grabbed Randy's extra Inductrix and started cramming.
Brazil is a movie about ducts
One thing that always bothered me about the Inductrix frame was its faux ducting. I never understood why you'd want the extra weight of the ducts when they were clearly too short and too wide to add any thrust. It'd be really hard to match the 3 g weight of the stock frame, so I thought my only chance was to make real ducts that would add enough lift to offset the weight gain. I've had good luck with ducting for the Liberty Ducted Quad and the Jerkybot, so I was optimistic that I could pull this off.
I've never printed with nylon – the thought of drying it in the oven for hours before printing didn't appeal to me at all. But Flo told me he had good luck with PCTPE (a nylon blended with thermoplastic elastomer) without doing much drying, so I ordered some. I started testing with TPU while I waited for it to arrive.

Just a few iterations. Love rapid prototyping.
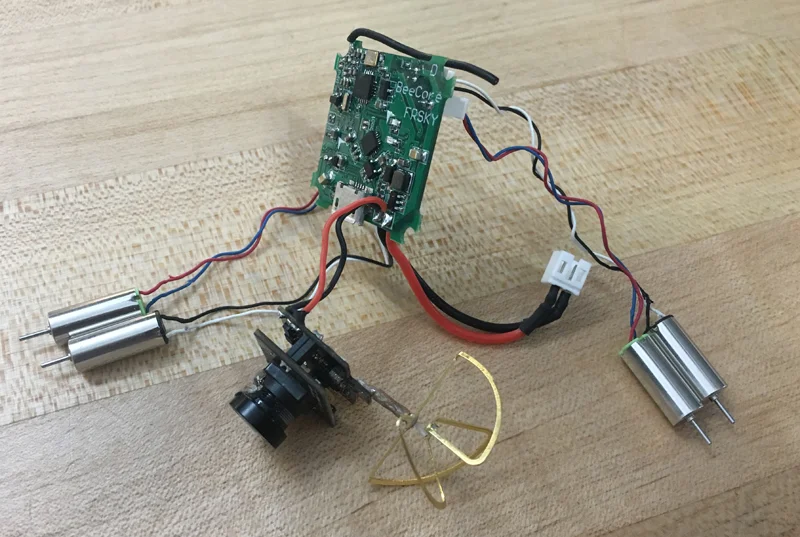
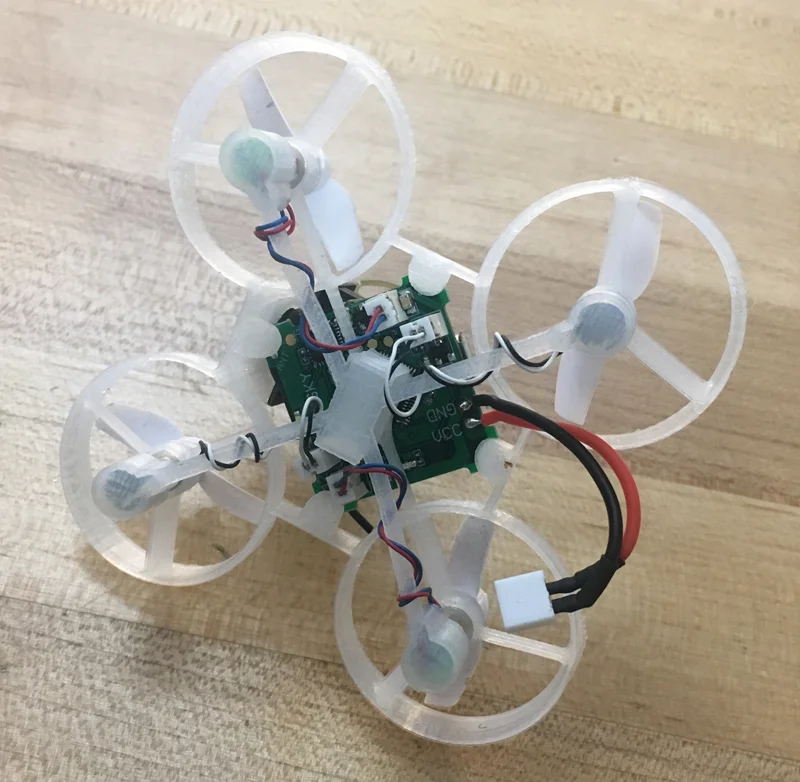
After much trial and error I had a TPU frame that actually flew pretty well LOS on stock motors and super old batteries from my NanoQX. It was a whopping 7.5 g, and I hadn't figured out the battery mount, so I just laid the battery on top of the FC. The motors pushed up from below and stopped against a ridge at the top so I could have the props at the exact height I wanted them. The duct was shaped like a duct should be, but not quite as tall to save weight. The props were as close as I could get them without rubbing. Unlike the 2205's in the LDQ, these motors couldn't just cut through the TPU to create clearance, so they needed a bit more space. The struts were tiny little airfoils, substantially beefier than on the Inductrix. Little TPU booties, motorbutts, slipped over the bottoms of the motors to protect the wires.
I couldn't be sure if the ducts were doing anything, but I figured they must be doing something since it was flying well. Feeling hopeful, I started to stock up cameras, FC's, motors, batteries...
The nylon arrived and it was the usual two day agony of dialing in settings.

3d printing fever, catch it!
Once I got the prints settings dialed I found the PCTPE to be an amazing material, super strong and more flexible than pure nylon. I also found a CA specific to nylon (normal CA doesn't work), which helped solve my battery holder problem with a glued-on part. It seems so obvious in retrospect but it was really cool to get below the print plane.

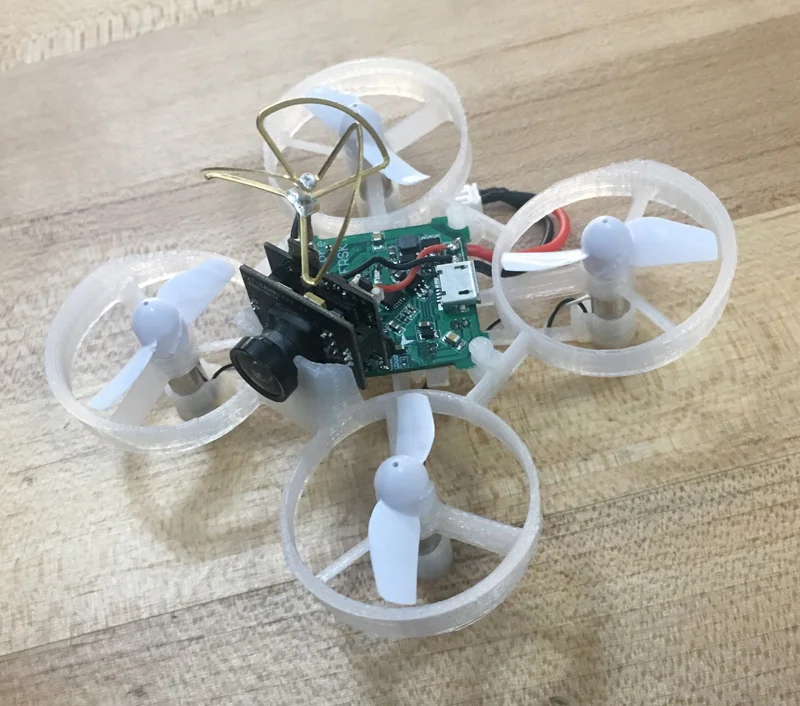
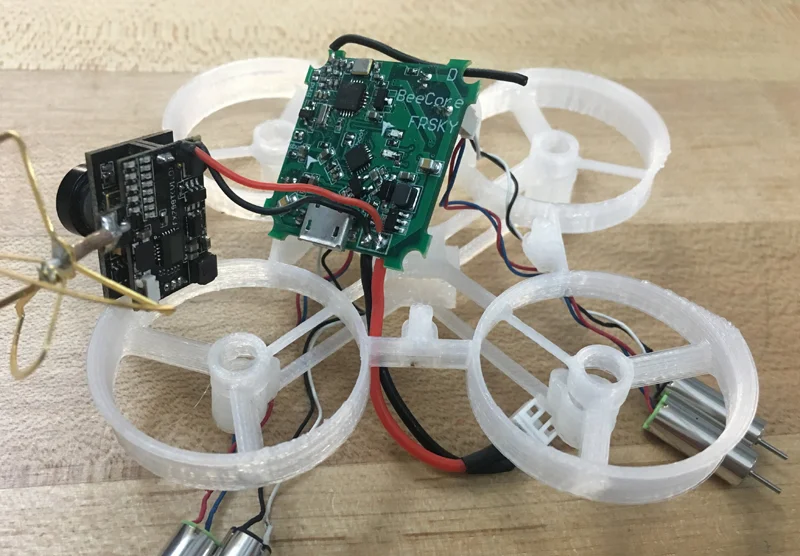
Things were looking pretty good now, and I built this frame up with a Crazepony cam/vtx, 14865kv motors, and Furious Acrowhoop board. For me, it flew great. Rate mode on a micro smoothed things out enough to lessen my headaches, and I was able to take advantage of the natural course that was my messy studio.

I then got to grab dinner with some Horizon Hobby guys, and was told that the angled struts on the Inductrix are critical to directing airflow. This was great news – even if they don't do anything, angling the struts lets me make them taller and stronger. I made the change, with them angled opposite the Inductrix since the Acrowhoop has the motors spinning differently than the stock board. (More info about what I learned about angled struts here.)

This one change seems trivial but almost killed me. This version was 7.1 g including the motor butts.
No, Brazil is a movie about a guy who's tortured and becomes delusional
I sent out several testers, with mixed results. Chris and Telis liked it, Telis even won a few races with it. Shane and Bluetoothxp didn't like it at all, finding it way too heavy and sluggish. I was having a hard time knowing what to believe – micro components deteriorate quickly, and subjective impressions are hard to quantify. Not only that, I was way too emotionally invested in the ducting – I really needed them to work, 'cause without them I'd be contributing almost nothing, just a stronger, heavier frame. Not much of an achievement.

I was doing my arm design thrust tests at this time, and it dawned on me that I could easily adapt it for the Whoop and finally get some empirical data. I compared my frame to a stock Inductrix frame (data here). Sadly for me, the test showed that my ducts did absolutely nothing. Time to face reality.
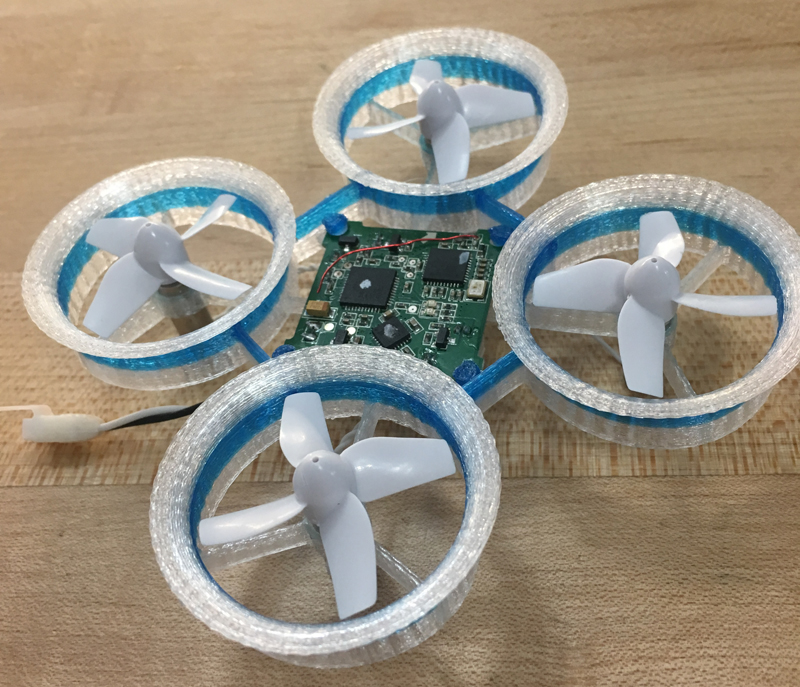
I chopped off the tops of the ducts and did a quick flight, and while the difference wasn't very dramatic , it did SEEM to be a little faster. I went back into Solidworks and trimmed away as much as I could, and got it down to 5.5 g. Now the frame was floppier, but it stiffened quite a bit with the FC installed. This version finally satisfied Bluetoothxp, who did see a dramatic improvement, though both of us found that we flew a little worse with it. I crashed again and again on lines I had no trouble with previously. Was it the speed, change in feel, or was it flying worse because it wasn't as rigid? I have no idea.

Right back where we started. Ducts just prop guards now.
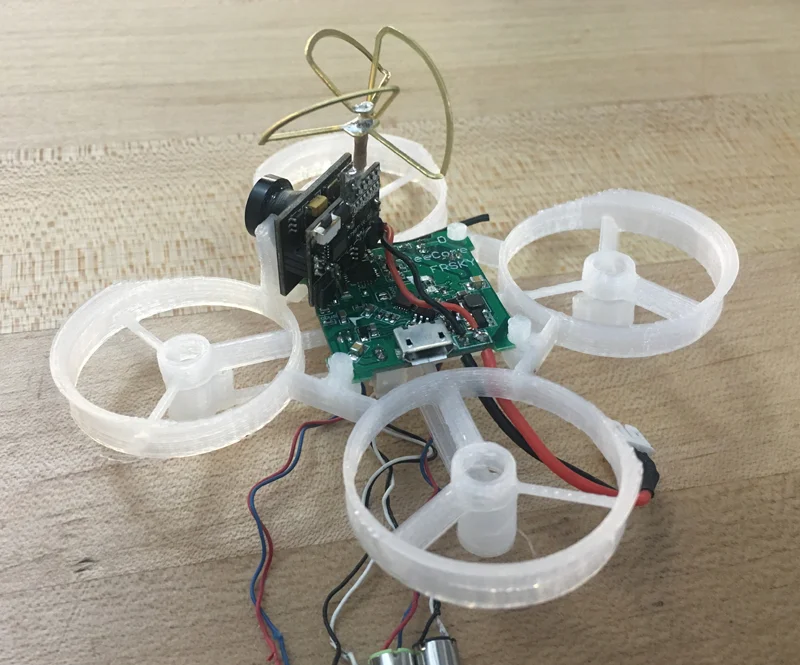
Control.fpv got parts to build one, and he asked if I could integrate a camera mount into the frame. I batted away the request twice as a nuisance (the guys make a lot of requests!), then on the third time it clicked and I added this.

Now I can swap out the canopy, rubber band, double stick tape, or whatever means people use to attach their cam, with just a 1/4 g gain. That's about a 1 g win.
The FC stiffening up the frame made me think that the components were stiffer than the frame, and the frame should take advantage of them. If I bridged the motorbutts to the battery tray, I could create a box structure and gain a lot of rigidity.
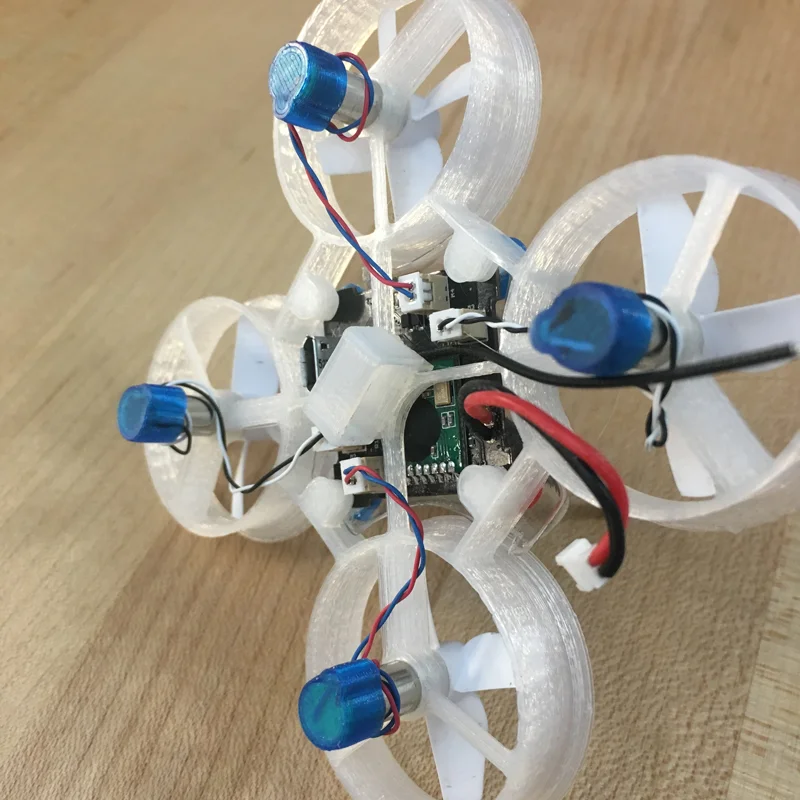
I wanted to design a simple flat component that would print with a minimum of supports, but the five pieces don't sit on the same plane. The struts would have to bend up to the battery tray. I did my best to calculate how much longer they'd have to be, as well as the angle the motorbutts would have to be at to end up vertical after the bend.

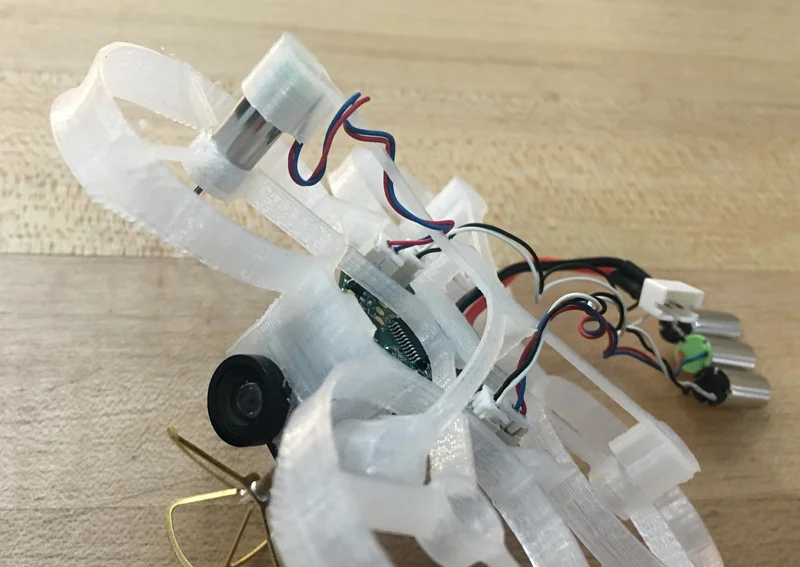
The moment I glued on the battery tray and snapped the butts over the motors was one of my happiest designer moments. I came within a half millimeter of getting the strut length right (it took a curvier path than I expected), and the motor butts angled up just right. It stiffened the frame up substantially and looked way cool. My build went down to a very acceptable 20.7 g.

Most importantly, I FINALLY feel like I've contributed something to the Whoop category, something new, unique, functional, and not a simple rehash of the stock frame. The frame now flew very under control again, which led me to think that it might be its newfound rigidity at work. Then my BeeBrain AND Acrowhoop died, so I asked the guys to pull off the motorbutts and fly. Some felt a difference, some didn't. Quads are mysterious, man.
Here's Control on his. This clip mercifully devoid of me getting lapped.
Actually Brazil is a movie about plastic surgery
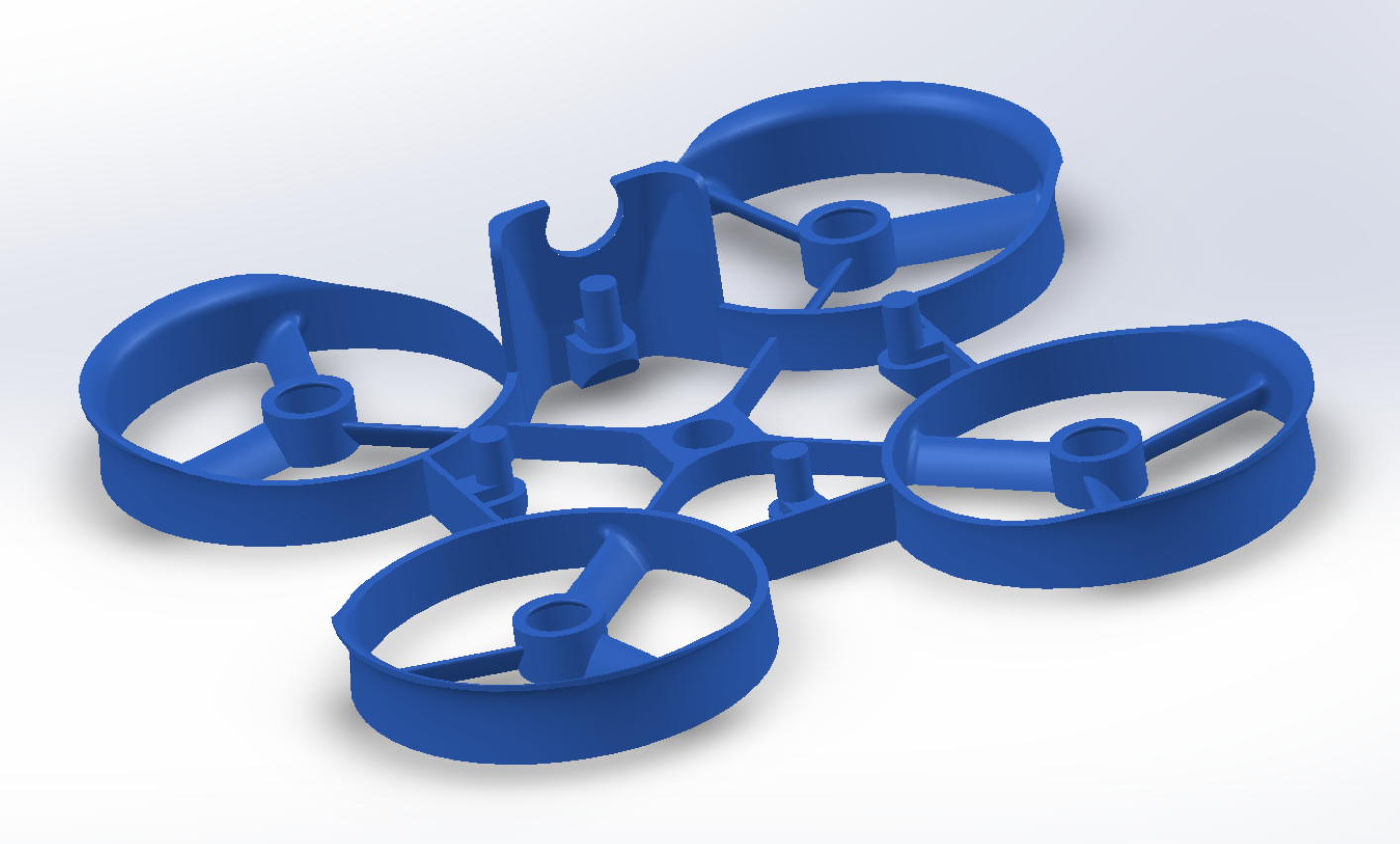
The Tiny Whoop community has an open source-y feel, so I'll post the STL's to Thingiverse. But nylon can be a tricky material so I also want Chris Griffin to sell perfectly optimized prints. I sent him the STL and he started to pick it apart. Weak points that I thought were poor layer adhesion (due to my crap 3d printing skills) turned out to be anomalies in the slicer or bad retraction settings. Chris identified those spots and I redesigned the part to correct them. This has become a real routine for us, where I design something the way I like and Chris makes me change it to print better.
For example, I prefer long swooping transitions, but Chris usually pushes me to avoid gradual tangents from horizontal to avoid stairsteps. I shortened that curve and the ducts look much nicer now.

New one on top.
Next Chris attacked the cam mount, snapping them 'til I beefed it up to his satisfaction. The battery holder/motorbutt got upgraded too, made taller to grip the motor better, and closed up with a channel for motor wires.

Jesse Perkins told me he prefers the stock Inductrix board, so I mirrored the struts for an Inductrix version.

The struts are angled opposite the props. It'll fly terribly if you get it wrong.
Build Guide
Building one up is pretty simple, but here's a couple tips to make it less annoying.
I start with everything plugged in 'cause it's hard to get at the plugs with the struts in the way. Separate the left and right motors.
Drop the motors through the frame on each side, as well as the pigtail down the back.
Push the FC down around the pegs, snap the camera in. If the camera rotates give it a drop of hot glue. There are TPU 'nuts' to slip over the pegs, but my FC's usually stay put so I don't bother with them.
If there's excess wire wind it around the struts or the motors. Push the motors in from below until it's flush against the lip at the top. Push the strut on, making sure the wires sit in the channel on the inside.
And that's it. The mullet mod for the vtx is highly recommended, I just haven't gotten around to mod'ing this one. Also, note again that the struts and props are pitched in opposite directions.