
Bigwig and Corgette
Two frames focusing on Z axis balance.
Bigwig
This is another shot at creating a frame with perfect CG on all 3 axes, something I first tried with the Corgi, then the Zoompod, and Hedwig. This was to be a 5" racer, with no provision for HD cam. And just like Hedwig, things get complicated when the battery moves up to the prop line.
My first attempt was a full 3d printed pod. As a quick proof-of-concept I drew it up using the Orca bottom plate. This was a massive part, with an internal shelf between the battery and the electronics. The print was heavy as hell, full of internal supports that were hell to remove. The FPV cam was tucked away in a compartment of its own, and very hard to insert and mount. It flew just once – it had nice characteristics but was heavy and uninspiring. The Orca's mounting points weren't enough for the tall pod, it kept leaning over and getting cut by the props.
It's a big ass pod. We called it the Capybara.

There's an internal shelf for the battery. If this had worked I would've drawn up a cover for the battery and then it would've been all slick and enclosed.

The battery wasn't easy to plug in. Capy, did I ever tell you about those rabbits? Keep looking straight ahead.
The idea lay dormant for a while 'til I started messing around with Hedwig, and realized that this would be much more doable with a carbon rear deck and a TPU cam mount up front. Time for round 2.
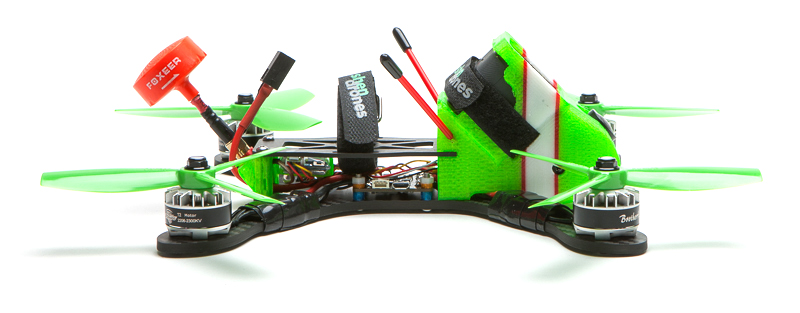
With the motors and the frame below the props, you usually get perfect Z axis CG if you put the battery just above the props. With the way we build now, 20mm is enough stack height. So I started with a 36mm wide body (same as the FC), with a top deck at 20mm, sized to just hold a 1300 battery.



I could've made this a long frame, but I have a theory. I think one of the benefits of the long frame only applies to imbalanced setups. When you tilt forward on a bottom battery frame (a frame where CG is low on the Z axis), you go from a balanced frame to a tail heavy frame. On a longer frame that shift is a smaller percentage of your total frame, so you're less tail heavy compared to an X frame. And that should mean your motors share the load more evenly. Of course you can fix this by shifting your battery forward (and many people do), but CG is never correct for all tilt angles.
Now, since Bigwig is balanced on the Z axis, CG is exactly between the motors regardless of tilt angle. I know long frames still have superior pitch stability, but I wanted to see how well an X flew with perfect CG, so Bigwig is starting out as an X.
Also, note how complicated things get with the battery on top. On a bottom battery frame the battery can overlap the prop circles no problem. You can throw an 1800 or 2200 on a Mixuko, Mixuko don't care. But here, the 1300 is just millimeters from the props, with every lead carefully tucked away.
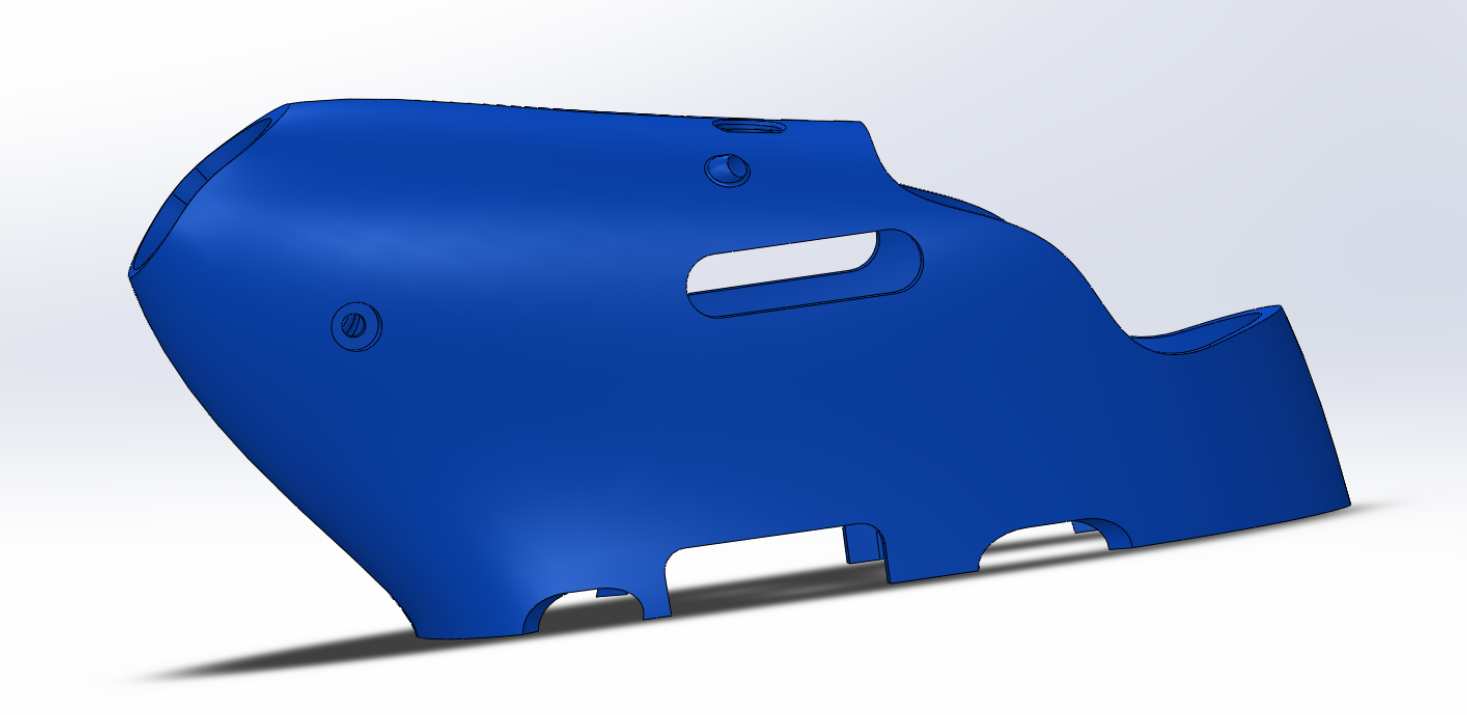
The cam mount had a tendency to slide sideways into the props, so I changed it from an open bottom design to a full nosecone. It overlaps the bottom plate for more lateral support. The enclosed nose should keep it from scooping dirt into the FC area in crashes as well. The cone is simply two extruded cuts along x and z with big fillets on the edges to make it look like a more sophisticated shape. It reminded me of the balsa fuselages I built as a kid, trying to make a rectangular cross section look like a proper plane.

For reasons unknown the cones kept printing with a dimple, but just on one side.

Then Chris (Patient 0) had the genius idea of printing it standing up, which made it print perfectly. It also helped with the bottom rising from the bed at a tangent as well (see the remnants of support structure on the bottom of the blue print above). I adapted the part to have more of a flat surface in back, and now it's super clean and pretty.


I hadn't figured out how to mount the vtx yet, so I just shoved a pigtail unit in back. Other than that, Bigwig was flying quite well, super snappy and really fast . The vtx punished my negligence by repeatedly slipping out the side and getting chopped, which led to this tail unit:

So things were looking pretty good at this point, and then I crashed it good. (Flyingbear broke all his in quick order as well)

I wanted to see how far I could safely narrow the arms, so I made them taper down to 10mm. Seems it's time to widen them a bit. Also, I'd reflexively drawn them with cutouts for over/under esc mounting, but you'd never run your esc's under the arms on this frame. Time for v2 of the base plate.


Flyingbear fell in love with the frame, declaring it his race rig for next season. I asked him to explain why he likes the frame so much:
"A top mounted battery places the center of gravity vertically in-line with the motors and propellers. This creates more balanced handling and tighter cornering. Even though the quad is slightly larger than the smallest true x designs, it corners tighter. For racing, it's all about handling! Once I tried this frame, I didn't want to fly anything else. Why fight the mass when you don't have to? True x frames typically have a battery mounted on the bottom which creates a pendulum effect, pulling the aircraft out of turns.
It's simple enough to compensate for the pendulum effect by banking early and applying more throttle, but after flying a top mounted battery I don't like having to fight the pendulum anymore.
The only reason I'll still use a bottom mounted battery is if I need to fly a battery larger than 1500mah 4S."
Ark Nabbit brought up another interesting point. He believes that an unbalanced quad makes the motors work harder in corners as they fight the pendulum effect (a bottom heavy quad will want to bank harder in a turn, so the inside motors have to spin up to maintain lean angle). He uses the smallest possible batteries on bottom battery frames to reduce the pendulum effect, which in turn makes the quad more efficient, which in turn makes the smaller battery viable, and this sets up an infinite loop which ends in a quad that flies without a battery at all. That last part might be speculative. Anyhoo, by extension a balanced quad should be even more efficient.
Bottom battery X frames have come to dominate racing because they're light, simple, and present less frontal area to the wind than H frames. In other words they're faster. Perhaps Bigwig can compete by being as small as an H frame can be while offering better efficiency and handling.
Corgette
I was really digging this configuration, and it occurred to me that this would be a good way to redesign Corgi. The original was my best solution for the 'perfect balance centralized weight' problem back then, but it was complicated, delicate, and hard to build. Now, with all I've learned since, it can be remade much simpler.
Sticking with the 'just wide and long enough to hold a 1300' concept, I dropped a 45 degree session mount behind the fpv cam, as low as I could get it. The fpv cam angles were reduced to 25-40-55 degrees instead of 30-45-60. I envisioned a drop-in Session mount that would flex open then lock over the top of the Session. Like the Bigwig nosecone, it'll slide down over 20mm standoffs, but because of its extra length two additional screws will hold down the front. Bigwig handles great, so I stuck with pure X geometry.


Ryan Gury had been clamoring for such a configuration, and he was the first to come over and grab the carbon when it came in. He loved the way it flew, and as expected with the battery and camera so centralized on the roll axis, he had to drop his roll P a ton. It took me a a couple days to get mine built, and even a crap pilot like myself could feel its sweet, pure rolls. Compared to the Zoompod, another Session holder with perfect balance on all three axes, it was noticeably slower, thanks to its larger frontal area once leaned over.

My eyes! Sometimes the color scheme is more about using up leftover filament.
The consensus from the boys was that it's an acro frame, and the Session angle had to go down to 30 degrees. I dutifully complied after some whining.

Much better. Phew.
With winter in full swing in Sweden, Tengu put his racing frames away and focused on acro. After a day on Corgette I got this message: "Maiden flight done, it corners so perfect. Can not understand why anybody would prefer a pure x or wide x when this config is so much better."
They say the plural of anecdote is not data, but what about the singular? Yes, it's just one (albeit great) pilot, but I am pleased that Tengu mistakenly thought Corgette was a long frame. In theory a perfectly balanced quad should need less help feeling locked, but in reality? Who knows. In any case I'm comfortable with Bigwig and Corgette being pure X frames.
Ryan and I both ripped up a cone in crashes, so I'm going to post those stl's to Thingiverse. They're not delicate by any means but I like the idea of people being able to make spare parts quickly. Just make sure to print in TPU 'cause the fpv cam and the Session won't go in if it's printed with rigid filament.

I printed a beautiful nylon nosecone, only to find the fpv cam won't go in.
As usual Chris Griffin will be printing them for production. Finally, now that there are some good options for stackable vtx's with pigtails (Diatone, Furious), I'm reverting to the simple butt without the vtx sleeve. A Kombini/Passado stack is just about the cleanest/easiest build possible, and leaves a ton of empty space even in this tight configuration.
Now for some Patient 0 quad porn. 'Patient' is an apt name for someone willing to do a million hot swaps for those stripes.


You can preorder them now here!