
Tricopter/Y6
My first big multirotor was an FPVManuals tricopter, and it didn’t survive me learning how to fly. Because I missed the tricopter’s graceful swooping flight, and because the proper number of multirotors to own is n+1, I picked up a Hobby King X900. It was surprisingly well designed for a $27 copter – the yaw mech was solid and smooth, it folded up nicely, and it even had shock absorbing landing gear. It flew like a dream, no doubt aided by its gigantic 900mm wheelbase, with that typical tricopter motion that Josh Bixler waxes lyrical about, landing so softly that it usually took a second for me to realize it had touched down.
It was, however, terrible at video. The 14mm aluminum booms are extremely vibratey (science word alert), and there was no dampening on the main frame. So I drew up a Lumenier-style clean/dirty frame.


One thing I did differently was threading the bobbins directly into standoffs. You can’t use threadlock on bobbins – the bond can be stronger than the bobbin itself, making the damper shear from the stud when you try to unscrew the nut. Here, the standoff is held in place by the screw at the other end, so the bobbin can be screwed on lightly with no threadlock, and it isn’t going to come undone with vibrations. It’s a nuisance for repairs but it looks clean and works well otherwise.

I simply copied the original folding mechanism and got rid of some extra material at the pivots.

I also filled the aluminum arms with expanding foam to deaden them – not my idea, I read about it somewhere. I also read to mask off the ends to keep them clean. Laying them on a Trader Joe’s bag to dry, that was MY idea. I first flew it with some NTM motors and 9″ APC’s I had laying around, and it worked quite well, perfect jello free video. Here’s a super boring video of me doing some low speed practice tracing a patch of dead grass.
Did you watch all 3 minutes? Seek help. Never to leave good enough alone, I tried some Lumenier 4006’s on it, not knowing they have timing issues with Afro ESC’s. The rear motor quit and it reversed itself into the ground. I had so many experiments going I didn’t bother to repair it.

It was pretty while it lasted. Waaa.
Months later I started to grow dissatisfied with GoPro video, or maybe it was that n+1 itch again. I decided I wanted to build something to carry a Sony a5100 on a DYS gimbal (just 2 axis please, 3 axis is for perverts and degenerates), and the X900 started looking like a Y6 to me.
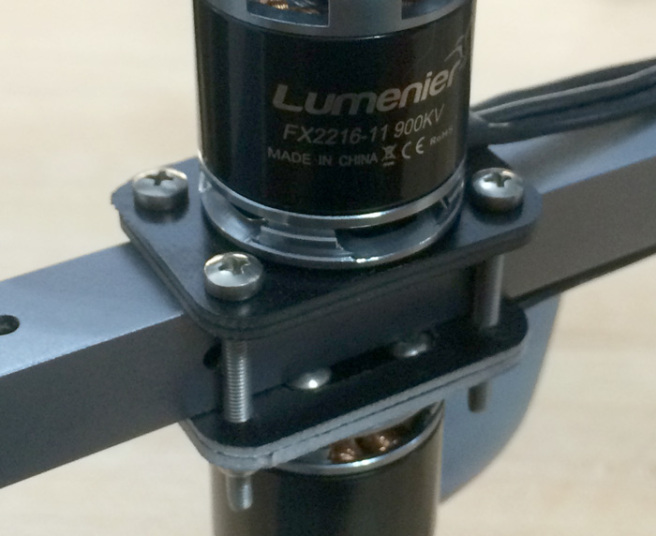
The Y6 is a work in progress. I started with some simple motor mounts. They clamp onto the boom so they’re adjustable. Each side is two pieces of G10, the inner piece is a recess for the motor screw heads. I could’ve done a recess cut into a thicker piece but this just seemed simpler to machine.
The landing gear is straight up stolen from 3DR’s Y6, except mine clamp around the outside so they’re adjustable as well. You can also easily pop them off by removing one screw and loosening the other two slightly.

It could use one more standoff in the middle to stiffen things up. Not cutting down the wires ’til it’s all finalized.

So many wires. The ESC’s will eventually go inside the dirty section, but the wires will still be outside on the booms. It’s a big boy.
I had a lot of trouble eliminating jello on my gimbal’d quad using the Lumenier 4006’s and 12″ props, so I wanted to stay with 2216’s and 10″ props here. That means it’s just about at 50% hover to carry the 640 gram camera/gimbal assembly and no more than a 330 gram 3300 4s.
Most rigs that carry bigger cameras have them slung under the CG with a 3 axis gimbal, but I prefer having the camera up front like QAV540g or TBS Discovery, framing the shot by flying the copter. That means wherever the camera winds up to keep the props out of view, the battery will be on the other side twice as far from the CG. That makes for one long ass fuselage, where the battery just misses the rear prop. I’m kinda struggling with that idea, so for now it’s on hold pending the end of winter and more flight testing.


It’s just so wacky looking. Maybe it should be an X8?